项目简介
消化道癌占我国恶性肿瘤发病率的38%,消化道癌的早诊、早治可以显著提高患者的生存率,对人民生命健康具有重要意义。近年,经自然腔道柔性手术机器人不断出现,机器人辅助技术可以降低手术难度、缩短医生学习曲线。但是,消化道狭窄多曲动态环境约束下,如何实现柔性手术机器人的小型化集成设计、精准丝鞘驱传动与刚柔可控机构设计、高精度力/形感知方案设计、精确定位导航与高效自主介入方法设计等是需要突破的技术瓶颈。
项目在国家重点研发计划、国家自然科学基金等项目支持下,围绕消化道早癌诊疗需求,从诊疗器械创新、入路载体创新、定位导航创新、应用集成创新四个层面开展系统设计,成功研制了具有完全自主知识产权的消化道早癌诊疗柔性手术机器人整机系统,突破了上述技术瓶颈,解决了诊疗过程中“不精准、不稳定、不安全、不高效”四大问题,实现了高端医疗装备设计的颠覆性创新。主要设计创新点为:
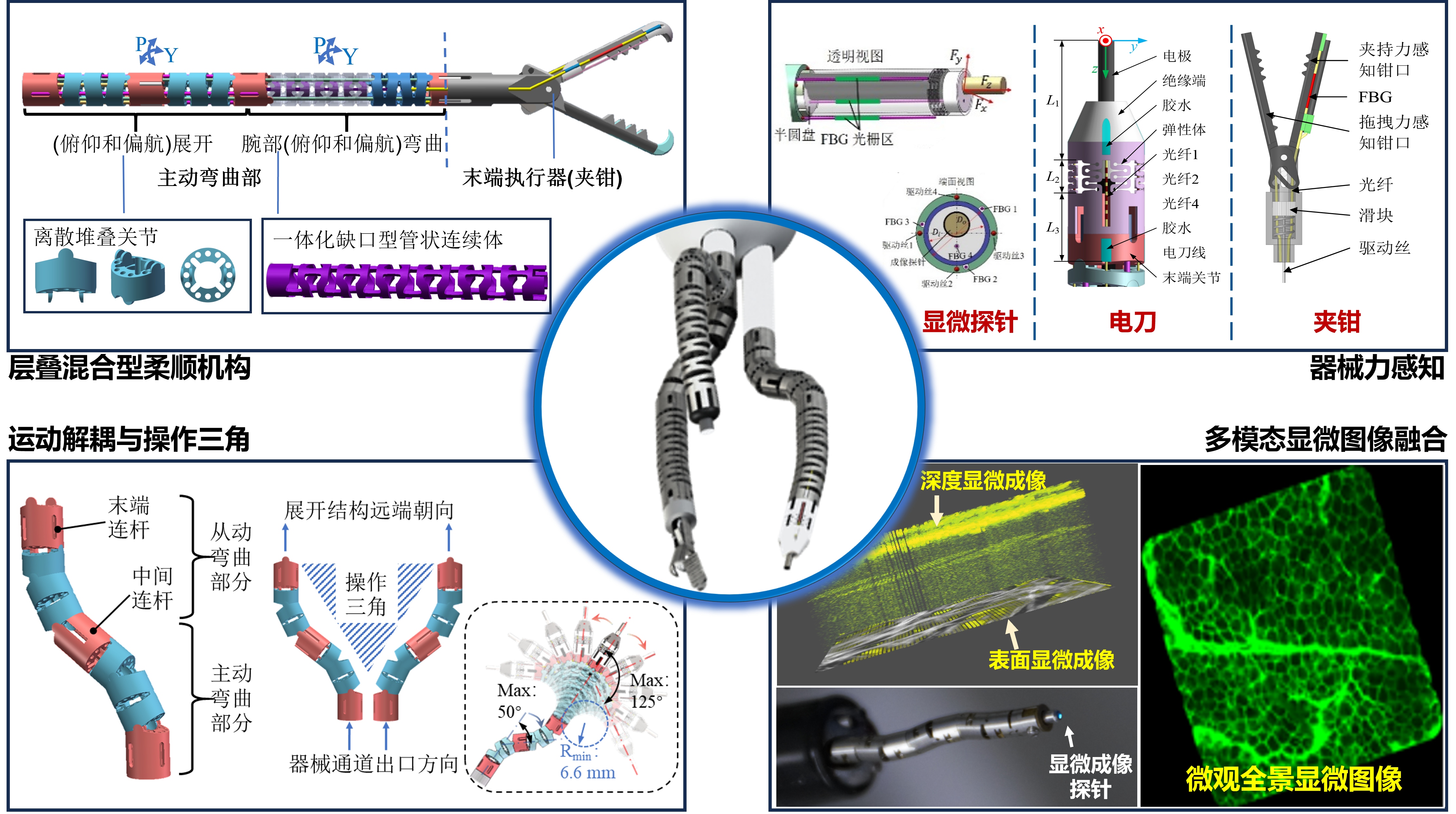
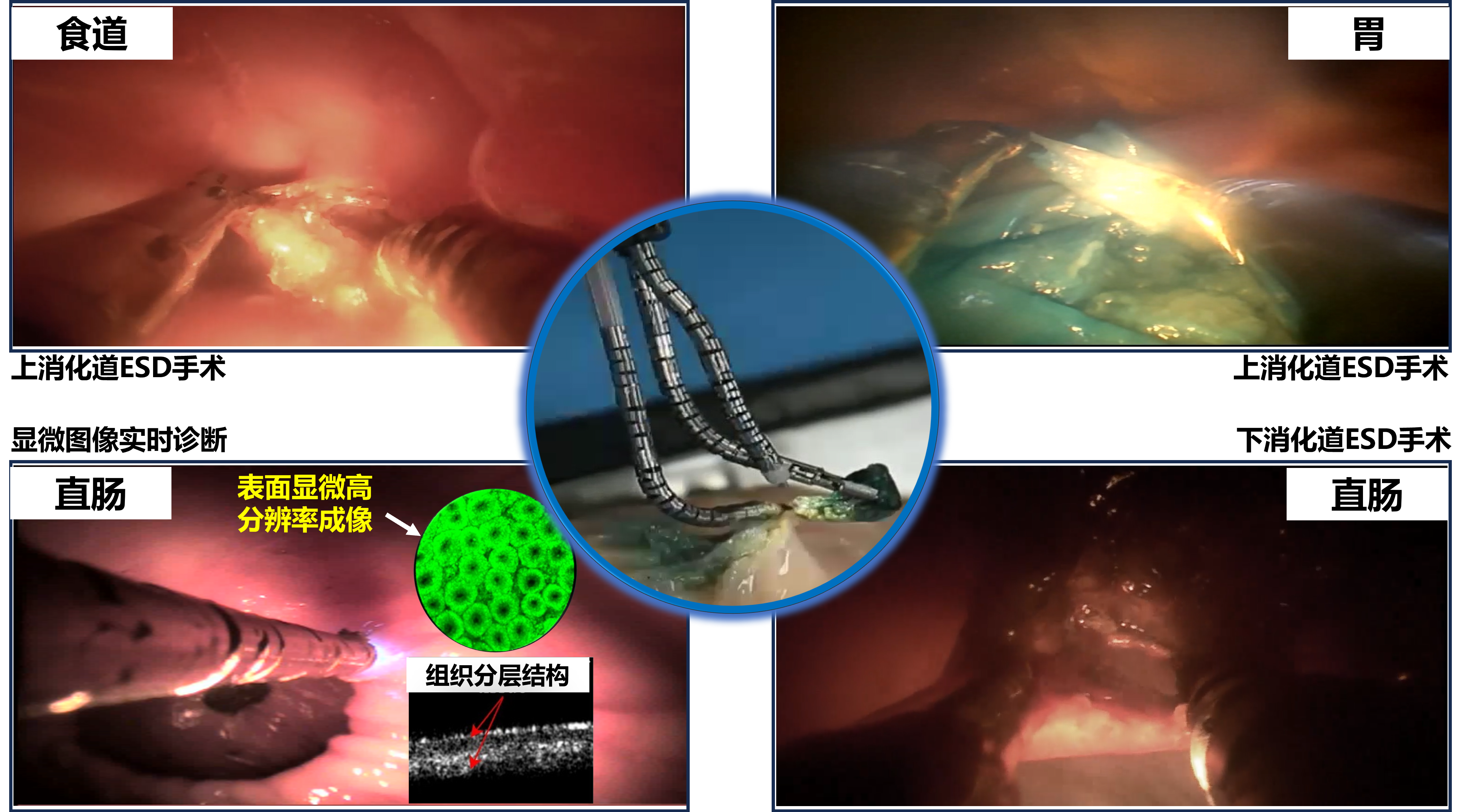
1.诊疗器械创新:基于动作微元思想,设计了层叠混合型运动解耦柔顺机构,形成了柔性诊疗器械小型化与力感知的成熟设计方案,开创了基于多模态显微成像的诊疗一体化新模式,实现了狭小空间下更灵巧、安全的诊疗操作,延伸了医生的诊断与手术能力;
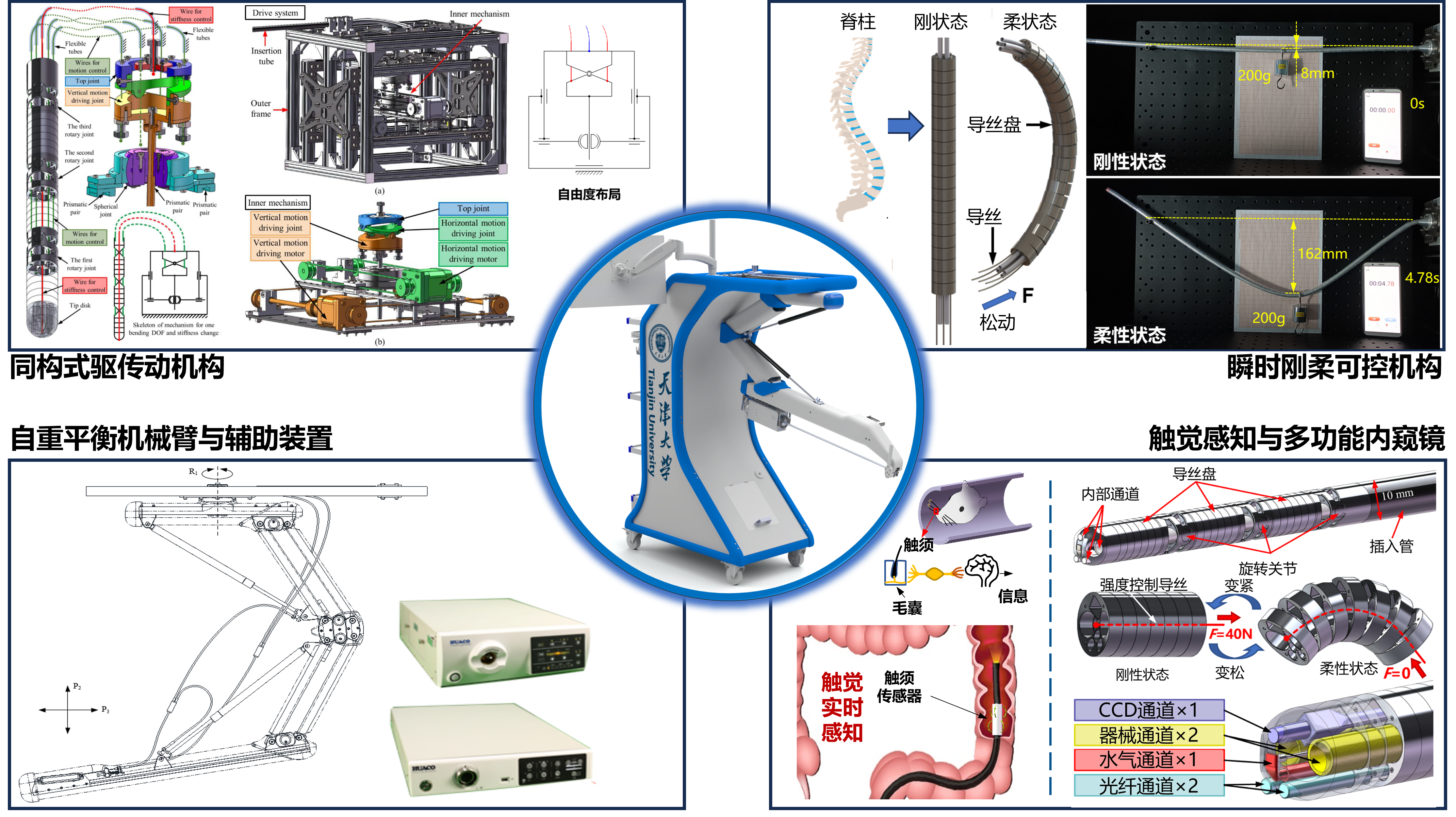
2.入路载体创新:面向消化道早癌诊疗手术实际需求,设计了具备入路刚柔可控、触觉及形态感知、多内窥镜功能一体化融合的消化道柔性手术机器人平台,在降低消化道手术操作难度的同时,提升了医生操作的稳定性与可靠性;
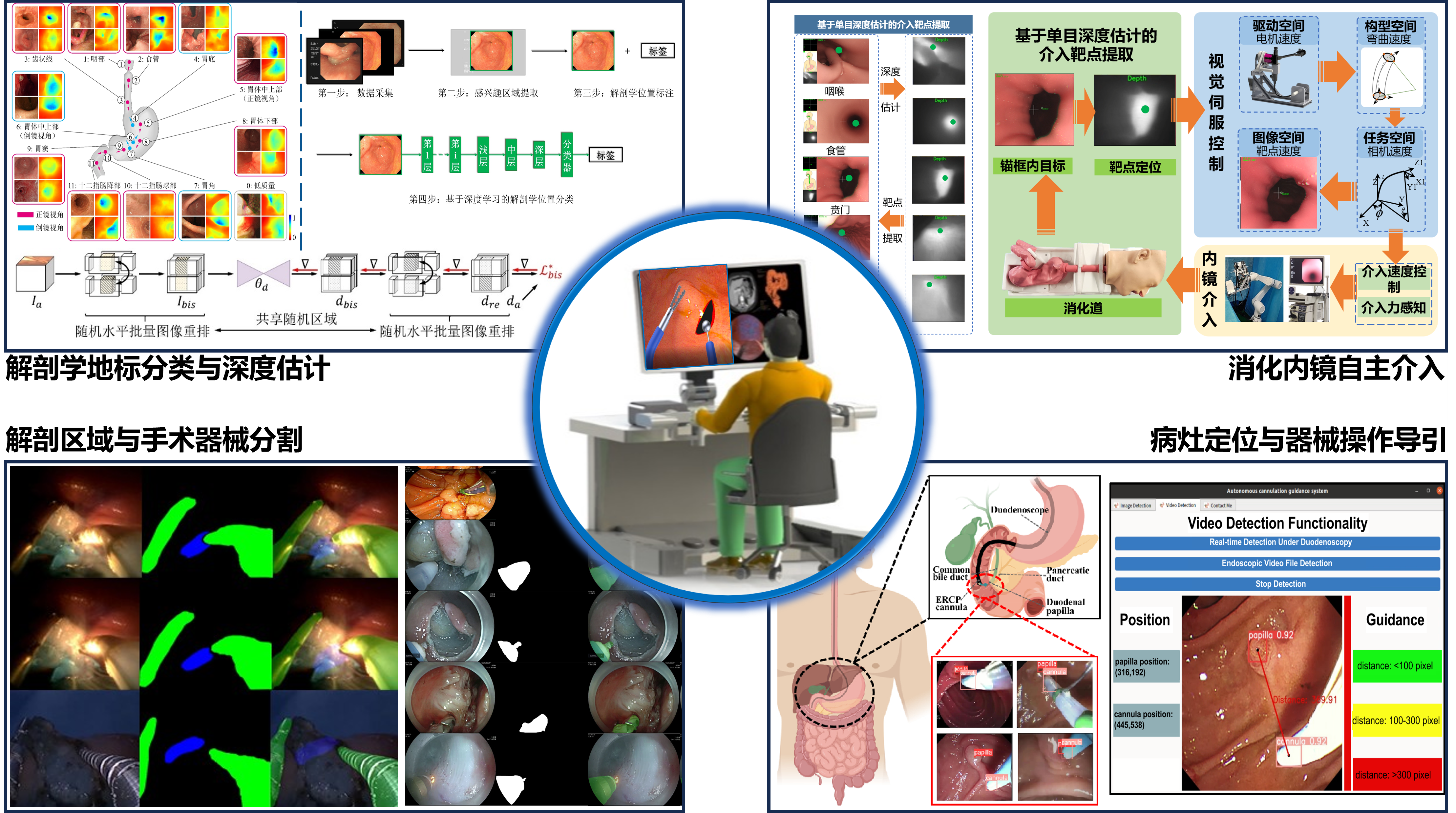
3.定位导航创新:为解决内窥镜下手术不精准、不高效的问题,设计了基于自监督单目深度估计的入路载体自主介入算法,建立了消化道内镜图像解剖学位置分类数据库,研发了柔性诊疗器械的定位与导航方法,实现了术中腔道全景建模与实时定位导航,减少了医生操作负担;
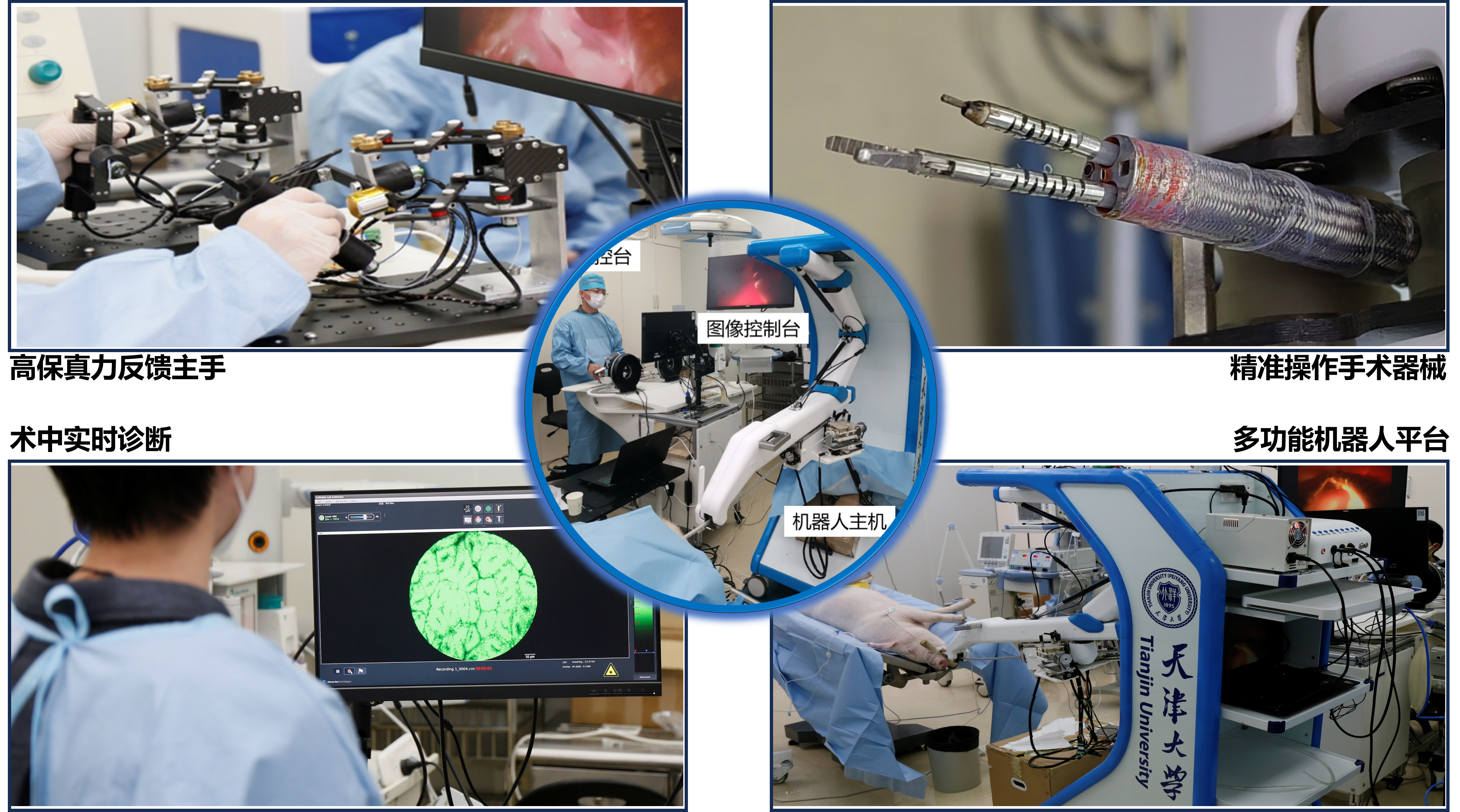
4.应用集成创新:结合消化道诊疗约束条件及各设计创新点技术特征,从内窥镜成像、人机协同与诊疗空间、合规性与可靠性设计、无菌设计等层面突破机器人系统集成设计技术,研制了具有自主知识产权的机器人整机,形成了术中病理诊断与精准手术一体化的临床应用新范式。
项目授权发明专利24项、实用新型专利1项、软件著作权1项;发表相关期刊论文100余篇,获国际会议学术奖5项;获医疗器械注册证12项。自主设计的手术机器人以及内窥镜、导航定位等核心部件,在150余家医院顺利开展了临床手术上千余例,验证了系统的安全性与稳定性,体现了所研发系统相对于传统技术的巨大优势。国家重点研发计划项目综合绩效评价等级为优秀,实现柔性手术机器人整体外径9.8mm兼具多种灵巧诊疗器械、变刚度、力感知与显微成像功能,属于国际首创,主要技术指标均超越国际领先水平。通过颠覆性机器人机构与系统设计,解除了以往柔性机器人设计中,小型化与多功能化之间、灵活性和负载能力之间、手术效率与安全性之间的相互制约关系,可实现“看探诊治”一体化,为癌症诊疗提供了新的技术模式,引领了高端医疗装备新兴产业变革。国内首个获批经口入路手术机器人三类医疗器械注册证,消化道入路载体实现了同类产品全球最小。三年累计新增销售额6064.36万元、新增利润4459.28万元,产品推广至26个省级行政区,对于打破国外手术机器人系统在该领域的垄断地位具有重大意义。消化内镜手术机器人需求与潜在市场巨大,本项目应用前景广阔,符合国家新质生产力布局,可为国内经济发展注入活力,显著提升人民健康水平。
 天津大学,北京柏惠维康科技股份有限公司,北京乐普智影科技股份有限公司
天津大学,北京柏惠维康科技股份有限公司,北京乐普智影科技股份有限公司